

-
⊙三维数据
⊙ADAS 辅助驾驶
⊙高精度地图 -

导航地图
覆盖多平台的地图功能
-
道道通通过精准的数据采集,开发完善的服务平台,完成地图的构建工作。同时我们还提供强大的地图再开发能力、全面的地图数据支持以及离线在线两种使用模式,满足各个场景下对地图的需求。
适用平台: QNX、 Linux、 Android 、 WinCE、 Windows等 -

精准数据体系一体化
建立车企&客户反馈系统:通过互联网资源变化监测分析、情报搜集等方式对需要更新的数据进行追踪,强化测试和用户反馈获取地图更新情报。
- 每日上百用户纠错
- 每月超过2000公里产品实测
数据可靠、成图快速、专业技术、自主研发
拥有整套从数据处理、专业的图面颜色、符号化配置设计、快速程序
切图到电子地图增量发布完整技术流程和工艺





丰富的地图数据系统
- IconPOI 数据
- Icon路况
- Icon电子眼
- Icon4S店
- Icon停车场
- Icon生活服务通用信息
-
货车导航数据
定制货车导航数据:
⊙限高、限重、限速、限宽、绿色通道等限行信息
⊙加水/加气/餐饮POI、汽车维修点等定制POI信息
⊙ETC、高速路桩、电子眼、避险路段等 -
充电桩
定制充电桩数据:
⊙充电桩信息深度分类:
桩位、数量、开通信息
插头规格:快充/慢充,交流/直流
⊙收费方式:现金、支付宝、微信、充值卡
⊙充电桩智能检索适配功能:车型/吨位/马力
⊙数据覆盖范围:全国数据覆盖 -
实时交通
实时交通:
⊙覆盖范围:道路等级全覆盖。
⊙实时更新频率:3-5分钟
⊙正确率: 对标百度实时路况,达市场同类产品标准
⊙历史路况预测: 基于海量路况信息,大数据分析算法,预测更准确
三维地图数据
-
 3D路况实景图指引
3D路况实景图指引
3D路口实景图60.2万
-
3D标志性建筑物
3D地标建筑 1700个
分布城市:北京、上海、广州、深圳等 -
3D街景
3D街景 覆盖25个城市
三维数据
-

路口3D实景图
-
地标性建筑3D显示
-

3D街景
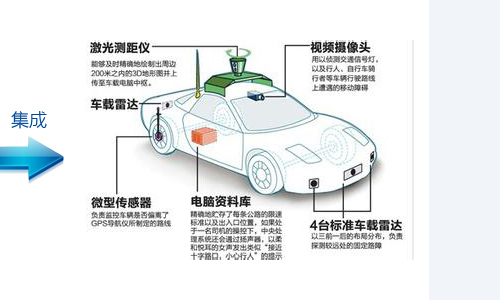
ADAS 辅助驾驶
ADAS系统构架:ADAS系统主要由三部分组成:传感器、ECU、执行器,地图系统:作为感知层的传感器的补充和增强

ADAS地图应用

-
自适应巡航(ACC)
ACC由驾驶员设置一个最高的巡航速度,由前置传感器确认【车辆正前方】可通行区域内是否有车辆,如果有车辆,则在安全制动距离内跟车;如果没有车辆,则加速到设置的循航速度。
-

-
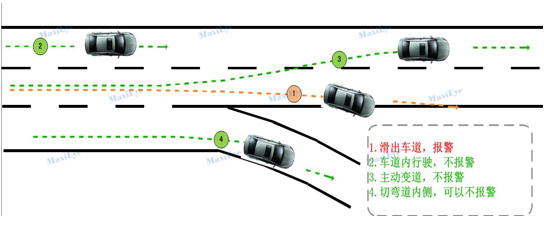
车道偏移警示(LDW)
LDW通过一个摄像头探测车辆前方区域。从而能够识别出当前所在车道右侧和左侧的道路标线。
通过摄像头检测前方车道线,计算出车身与车道线之间的距离,当驾驶员无意识偏出车道时,系统警告,提示驾驶员回到本车道内,避免危险。
-
-
弯道警示
结合地图数据中的高精度几何形状,以及曲率信息,在前方搜索距离内出现弯道时,提前播报减速信息和调整行车车道,为司机提供可预见的转弯警告。
自适应灯光照明调整
根据前方地形变化,改变灯光照明角度,为司机提供良好的视野。
限速咨询
根据前方道路的限速信息,提前为司机提供车速建议
能耗控制
根据前方道路地形变化,提前更改发动机的运行情况,来降低车辆的能耗与提升舒适性。
-
疲劳驾驶辅助检测
根据司机的驾驶行为和状态,判断是否是疲劳驾驶。
警示信息提示
根据前方路况及历史经验信息,提前告知司机前方事故多发地危险区域。
前碰撞预警(FCW)及行人探测与防撞警示(PCW)
实时检测前方车辆、行人,如将会发生碰撞则发出紧急报警,提醒驾驶员,有效避免撞车撞人事故。


-
高精度地图
结合高精度导航数据,车道级导航算法和引擎的研发,并与高校合作进一步研究无人驾驶整体方案的设计,进行本地化的示范运行案例建设。 -
亚米级三维车道级规划和导航
-

瑞图车道级地图样例
-

路口车道线
-
-
基于L2-L3的辅助驾驶;可结合硬件识别能力,支持基于ADAS的路线规划、车道级导航指引等功能。 -
-

L2~L3:ADAS辅助驾驶
-

静态高精地图数据制作
-
低空无人机采集
使用低空无人机三维摄影测量,制作车道数据模型。
-
地面补充采集
使用高精度定位+LiDAR+全景,制作道路部件和属性
